

Produtos



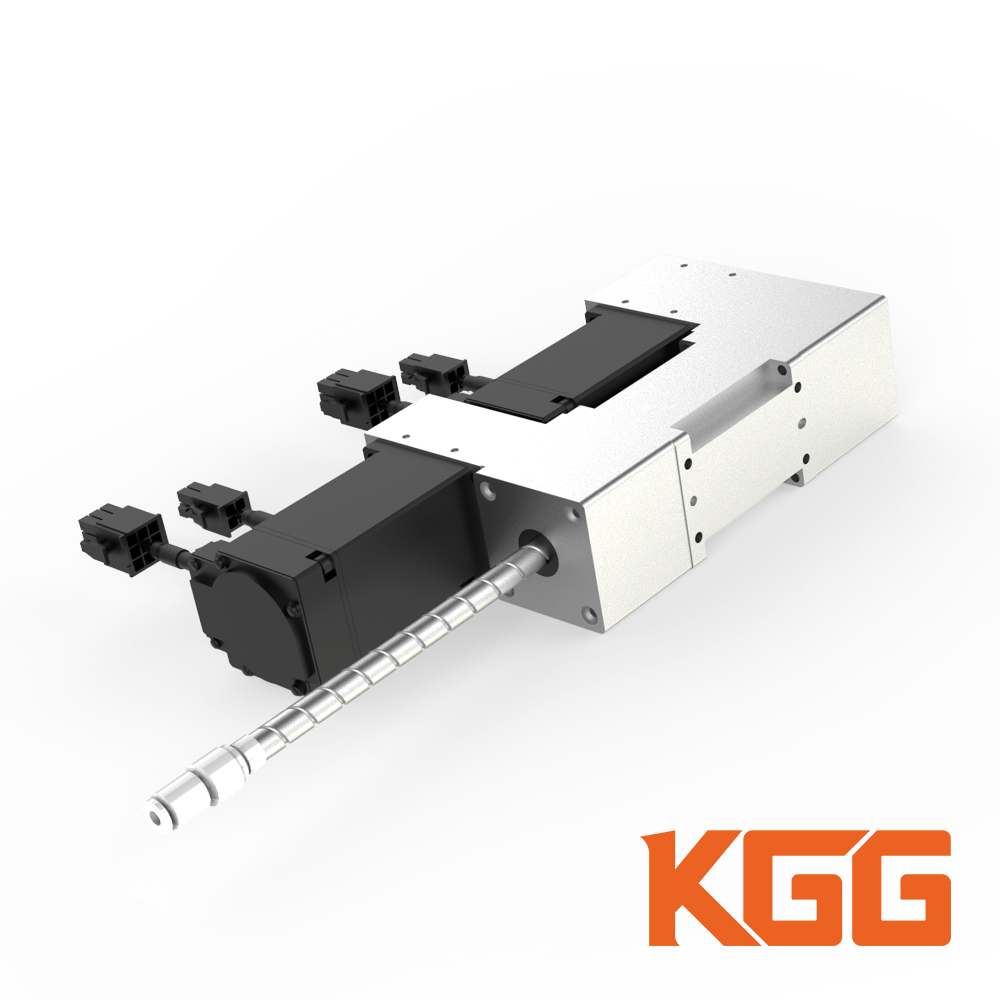


Actuador do eixe ZR
O actuador do eixe ZR usa un motor oco para impulsar o eixe Z para xirar a porca do parafuso de bólas e lograr un movemento lineal ascendente e descendente, punto no que a porca estriada de bólas actúa como unha estrutura de parada e guía para o eixe do parafuso. A porca do parafuso de bólas e a porca estriada de bólas xiran á mesma velocidade e na mesma dirección para lograr a rotación in situ do eixe de accionamento sen movemento lineal ascendente e descendente. O actuador do eixe ZR pódese usar con varios eixes para aforrar tempo na manipulación rápida de compoñentes.
Vantaxes do produto:
01. Folga axial de 0
02. Baixo ruído e movemento suave
03. Construción híbrida compacta e lixeira
04. Construción de codificador de bucle pechado
05. Control de presión posible

Parafuso de bólas con estría de bólas
Os novos produtos que aplicaron a miniatura KGGbtodostripulación conbtodosplina (G-BSS) e realizou tres funcións, movemento lineal (Z), movemento rotatorio (θ) e baleiro (V), cun só produto.
A forma delgada conséguese impulsando unbtodostripulación e unhabtodosliñanconstruído directamente nunhocomotor.

LinealMoción(z)
Linorellapalabraiconducindo unzeixomotor e xirando obtodostripulaciónnut. Neste momento, obtodosliñabdesempeña un papel de dispositivo antirrotación e guía de deslizamento dunstripulaciónsmango.
Rotación ((θ)
Xire obtodostripulaciónnut ebtodosliñanao mesmo tempo, á mesma velocidade e dirección, osO mango xira sen moverse cara arriba nin cara abaixo.
Baleiro (V)
DiámetrohOllow pode ter múltiples usos. Por exemplo, función de aspiración e soprado.
O corpo superdelgado é útil para aforrar espazo debido á combinación de motor oco + G-BSS (parafuso de bólas en miniatura con estría de bólas).
Sen po de desgaste da correa e polea debido á estrutura de accionamento directo.
Un número mínimo de compoñentes permite un deseño sinxelo e aforro de espazo.
No caso dun motor de tamaño 42, non só está dispoñible o movemento lineal (Z) e rotatorio (θ;theta), senón tamén a función de baleiro (V).

---Dispensación de líquidos de eixe oco
---Manexo de compoñentes LED de combinación multieixe
---Axuste do ángulo da oblea do CI
---Conxunto de lentes de teléfono móbil
---Etiquetado de teléfonos móbiles
---DEMOSTRACIÓNDdemostrador
Para ver máis exemplos, fai clic no vídeo de embaixo.
Verás un sistema de cintas transportadoras novo.
É tan sinxelo como montar bloques de construción e pódese deseñar cunha variedade de tipos de deseño, como circular, de pista, cadrada, de rampla de saída complexa, giratoria e híbrida, dependendo do ambiente operativo.
Cos actuadores de eixo KGG ZR funcionando en tándem, o transporte xa non é complicado...
| Imaxe |  |  |  |  |
| Modelo | Tipo ZRIN28 | Tipo ZRIN42 | Tipo ZRFS30S | Tipo ZRFS42S |
| Largura en mm | 28 mm | 42 mm | 30 mm | 42 mm |
| Recorrido máximo mm | 50 mm | 50 mm | 50 mm | 100 mm |
| Forza máxima de empuxe | 5N | 19N | 30N | 50N |
| Diámetro do parafuso mm | 6 mm | 8 mm | 6 mm | 8 mm |
| Descarga de PDF | * | * | * | * |
| CAD 2D/3D | * | * | * | * |
Terás noticias nosas axiña
Envíanos a túa mensaxe. Responderémosche nun día laborable.
Todos os campos marcados con * son obrigatorios.
-

Parafusos de bóla inoxidables de alta precisión de alta precisión...
-

Graxa de alta lubricación para parafuso de bólas
-

Rodillo repetible de alta precisión e alta rixidez L...
-

Actuador lineal de guía integrada HST
-

Parafuso de bólas de precisión de movemento lineal KGG GLR con...
-

Miniatura inoxidable de alto chumbo e alta velocidade...
-

Corredera de paso variable PT
-

Motor paso a paso e parafuso de bóla/guiante externo...
-

Cargas complexas de alta rixidez, funcionamento silencioso, equilibrio...
-

Arriba




